 KR Webzine Vol.142
KR Webzine Vol.142
- 2021年 12月
- 2021年 11月
- 2021年 10月
- 2021年 09月
- 2021年 08月
- 2021年 07月
- 2021年 06月
- 2021年 05月
- 2021年 04月
- 2021年 03月
- 2021年 02月
- 2021年 01月
- 2020年 12月
- 2020年 11月
- 2020年 10月
- 2020年 09月
- 2020年 08月
- 2020年 07月
- 2020年 06月
- 2020年 05月
- 2020年 04月
- 2020年 03月
- 2020年 02月
- 2020年 01月
- 2019年 12月
- 2019年 11月
- 2019年 10月
- 2019年 09月
- 2019年 08月
- 2019年 07月
- 2019年 06月
- 2019年 05月
- 2019年 04月
- 2019年 03月
- 2019年 02月
- 2019年 01月
- 2018年 12月
- 2018年 11月
- 2018年 10月
- 2018年 09月
- 2018年 08月
- 2018年 07月
- 2018年 06月
- 2018年 05月
- 2018年 04月
- 2018年 03月
- 2018年 02月
- 2018年 01月
- 2017年 12月
- 2017年 11月
- 2017年 10月
- 2017年 09月
- 2017年 08月
- 2017年 07月
- 2017年 06月
- 2017年 05月
- 2017年 04月
- 2017年 03月
- 2017年 02月
- 2017年 01月
- 2016年 12月
- 2016年 11月
- 2016年 10月
- 2016年 09月
- 2016年 08月
- 2016年 07月
- 2016年 06月
- 2016年 05月
- 2016年 04月
- 2016年 03月
- 2016年 02月
- 2016年 01月
- 2015年 12月
- 2015年 11月
- 2015年 10月
- 2015年 09月
- 2015年 08月
- 2015年 07月
- 2015年 06月
- 2015年 05月
- 2015年 04月
- 2015年 03月
- 2015年 02月
- 2015年 01月
- 2014年 12月
- 2014年 11月
- 2014年 10月
- 2014年 09月
- 2014年 08月
- 2014年 07月
- 2014年 06月
- 2014年 05月
- 2014年 04月
- 2014年 03月
- 2014年 02月
- 2014年 01月
- 2013年 12月
- 2013年 11月
- 2013年 10月
- 2013年 09月
- 2013年 08月
- 2013年 07月
- 2013年 06月
- 2013年 05月
- 2013年 04月
- 2013年 04月
- 2013年 01月
- 2012年 12月
- 2012年 11月
- 2012年 10月
- 2012年 09月
- 2012年 08月
- 2012年 07月
- 2012年 06月
- 2012年 05月
- 2012年 04月
- 2012年 03月
- 2012年 02月
- 2012年 01月
- 2011年 12月
- 2011年 11月
- 2011年 10月
- 2011年 09月
- 2011年 08月
- 2011年 07月
- 2011年 06月
- 2011年 05月
- 2011年 04月
- 2011年 03月
- 2011年 02月
- 2011年 01月
- 2010年 12月
- 2010年 11月
- 2010年 10月
- 2010年 09月
- 2010年 08月
- 2010年 07月
- 2010年 06月
- 2010年 05月
- 2010年 04月
- 2010年 03月
- 2010年 02月
- 2010年 01月
- 2009年 12月
- 2009年 11月
- 2009年 10月
- 2009年 09月
- 2009年 08月
- 2009年 07月
- 2009年 06月
- 2009年 05月
- 2009年 04月
- 2009年 03月
01
2021年 01月


随着自主航运船舶技术开发需求的增加,船舶状态检验也出现了数字化的话题。因此,正在进行收集船舶状态相关数值及视频数据,开发分析并诊断状态的技术。特别是在远程检验的必要性增加的时代,以视频为基础检出损伤的技术是必须的。
视频中的事物检出技术已经在各个领域被应用。从物体识别及检测、脸部识别、场所识别、人的姿势识别及检出等视频中提取对象的技术,随着电脑性能的提高,GPU计算的普及,根据复杂的模型的计算变得可能而急速发展。同样,船舶形态检验领域也像之前所说的那样,为了数字化进行着开发。特别是,在多个船体损伤中,为了检测出龟裂(Crack),集中开发算法。利用深度学习框架,自主开发/测试CNN(Convolutional Neural Network)模型,利用性能优秀的YLov5模型等,确认了船舶状态检查数字化的可能性。
为了构建学习数据集,收集了约5300多张船体损伤照片,其中通过第一次点检过滤的龟裂照片为629张。为了解决学习数据数量不足的问题,以一定的大小和间隔剪切保存,增加了个数。另外,在拍摄环境条件下,大部分图像都是在黑暗的环境下拍摄的,通过直方图平均化(Histogram Equalization)重新分配了各图像的像素明暗值分布。最后,根据自己开发的CNN模型KR模型和YOULOv5模型的解决问题的目的,分别构成了学习数据三个不同的内容。
|
|
目标 |
Labeling |
大小 |
学习图片 |
点检图片 |
合集图片 |
|
KR 模型 |
破损种类预测及分类 |
X |
256x256 |
龟裂:840张其他:840张 |
龟裂:240张其他:240张 |
2,160张 |
|
YOLOv5 模型 |
检测出个体及生成边界箱 |
O |
512x512 |
龟裂:2,403张 |
其他:601张 |
3,004张 |
表1. 各模型学习数据集
KR模型是自己开发的CNN模型,目的是解决图像输入时是否龟裂的问题。为了提取图像特征,由3个Convolutional箱子和Contente层、Flatten、Dense层组成。从32个过滤器增加到128个,512个,减少了Dense层的Node个数,最终连接到2个结果(Crack,Non-Crack)。为了防止Gradient Vanishing问题,使用了relu,将最后的结果以0 ~ 1之间值正规化,使用了softmax活性函数。
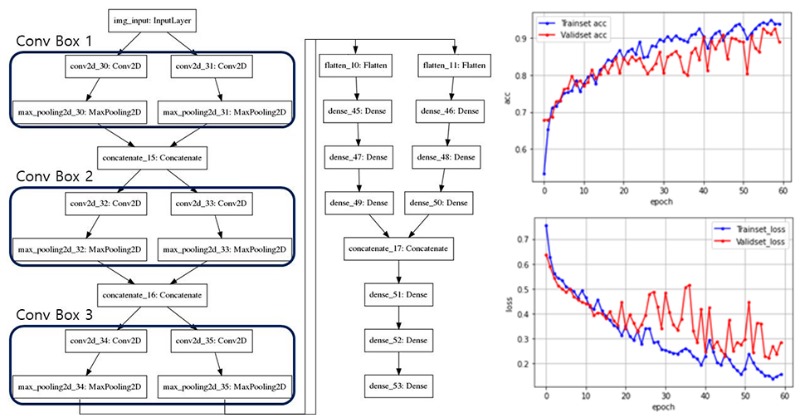
图1. KR模型结构(左)、学习及验证Accuracy曲线(右上)和Loss曲线(右下)
YOULOv5模型大体上是由Backbone和Head部分构成的Backbone是提取Feature Map的部分,Head是基于Feature Map寻找物体位置的部分。使用预设的Anchor Box生成最终的边界箱。基本上,为了识别各Feature的大小(8px,16px,32px),每个大小使用3个Anchor Box,共由9个Anchor Box构成。除此之外,通过Focus、BottleneckCSP、SPP、Upsampling等多种层次,提取影响的特性。
KR模型学习计算中使用的图片卡是Quadro RTX 8000 1个。另外,由于图像的大小和容量不大,所以第一次进入Epoch的照片的Batch大小设定为128,Learning Rate,快速掌握学习倾向,考虑到计算速度,通过最少学习次数判断的60次Epoch进行学习。经过第20个Epoch,验证Accuracy和Loss不稳定,虽然看起来是因为模型从学习数据中提取充分特征的多样性不足而出现,但是大体上是跟着倾向发展的。最终在第60个Epoch中学习Accuracy0.9393,学习Loss 0.1563,验证Accuracy0.8896,验证Loss 0.2857。利用学习和验证中未使用的龟裂和其他缺陷图片240张获得的权重值值进行推论,结果为Accuracy 0.8583。
YOLOv 5模型学习计算中使用的显卡有Quadro RTX 8000 4个。Batch大小设定为64,Learning Rate,考虑到模型的特性和学习倾向,总共经过1000次Epoch学习。从图表上看,精密度从学习10分钟后开始逐渐上升,从学习80分钟后开始下降。这与学习数据相吻合,对没有参与学习的数据的精密度下降。也就是说,缺乏充分学习龟裂缺陷图片特征的多样性。在图表中可以看到再现率的数值在学习80分钟后增加的情况,这是根据Confusion Matrix的实际True,模型预测为True的数量和实际False的模型预测为True的数量增加,验证数据的精密度会下降。也就是说,根据验证数据的限定数量,可以看作是Trade-off关系。最终利用601张验证数据,精密度为0.713,再现率为0.581。
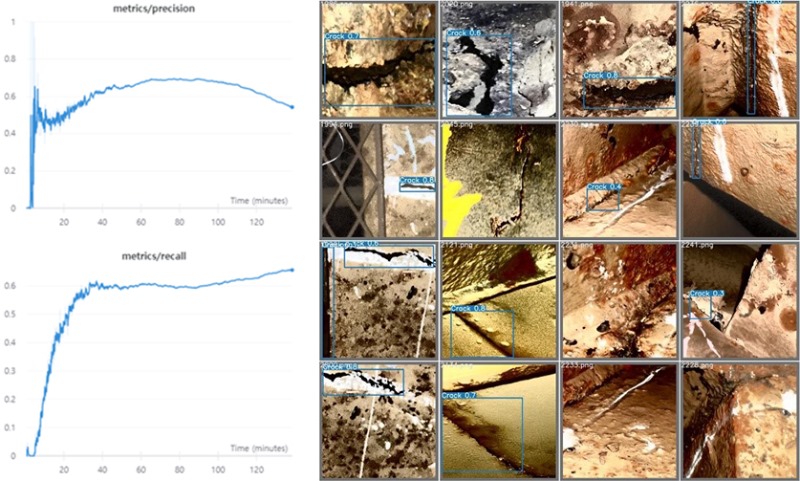
图2. YLOv5模型Precision曲线(左上)和Recall曲线(左下),裂纹检出(边界生成)例(右)
为了通过单纯的影像数据预测、分类目的、的KR模型和个体检出来掌握边界箱生成能力,利用YOLOv5来评价学习后的性能。解决问题的目的不同的两个模型的性能指标很难客观地比较,但是两个模型都能确认符合原来目的的结果。但是该结果显示由于数据数量和质量的限制,模型与学习数据相匹配。也就是说,通过绝对的数据数量增加和建立优质的数据组和多种CNN模型的比较、分析,通过模型的开发和扩张以及现场实际测试的反馈应用等,有待改善。
