 KR Webzine Vol.120
KR Webzine Vol.120
- Dec. 2021
- Nov. 2021
- Oct. 2021
- Sep. 2021
- Aug. 2021
- Jul. 2021
- Jun. 2021
- May. 2021
- Apr. 2021
- Mar. 2021
- Feb. 2021
- Jan. 2021
- Dec. 2020
- Nov. 2020
- Oct. 2020
- Sep. 2020
- Aug. 2020
- Jul. 2020
- Jun. 2020
- May. 2020
- Apr. 2020
- Mar. 2020
- Feb. 2020
- Jan. 2020
- Dec. 2019
- Nov. 2019
- Oct. 2019
- Sep. 2019
- Aug. 2019
- Jul. 2019
- Jun. 2019
- May. 2019
- Apr. 2019
- Mar. 2019
- Feb. 2019
- Jan. 2019
- Dec. 2018
- Nov. 2018
- Oct. 2018
- Sep. 2018
- Aug. 2018
- Jul. 2018
- Jun. 2018
- May. 2018
- Apr. 2018
- Mar. 2018
- Feb. 2018
- Jan. 2018
- Dec. 2017
- Nov. 2017
- Oct. 2017
- Sep. 2017
- Aug. 2017
- Jul. 2017
- Jun. 2017
- May. 2017
- Apr. 2017
- Mar. 2017
- Feb. 2017
- Jan. 2017
- Dec. 2016
- Nov. 2016
- Oct. 2016
- Sep. 2016
- Aug. 2016
- Jul. 2016
- Jun. 2016
- May. 2016
- Apr. 2016
- Mar. 2016
- Feb. 2016
- Jan. 2016
- Dec. 2015
- Nov. 2015
- Oct. 2015
- Sep. 2015
- Aug. 2015
- Jul. 2015
- Jun. 2015
- May. 2015
- Apr. 2015
- Mar. 2015
- Feb. 2015
- Jan. 2015
- Dec. 2014
- Nov. 2014
- Oct. 2014
- Sep. 2014
- Aug. 2014
- Jul. 2014
- Jun. 2014
- May. 2014
- Apr. 2014
- Mar. 2014
- Feb. 2014
- Jan. 2014
- Dec. 2013
- Nov. 2013
- Oct. 2013
- Sep. 2013
- Aug. 2013
- Jul. 2013
- Jun. 2013
- May. 2013
- Apr. 2013
- Mar. 2013
- Jan. 2013
- Dec. 2012
- Nov. 2012
- Oct. 2012
- Sep. 2012
- Aug. 2012
- Jul. 2012
- Jun. 2012
- May. 2012
- Apr. 2012
- Mar. 2012
- Feb. 2012
- Jan. 2012
- Dec. 2011
- Nov. 2011
- Oct. 2011
- Sep. 2011
- Aug. 2011
- Jul. 2011
- Jun. 2011
- May. 2011
- Apr. 2011
- Mar. 2011
- Feb. 2011
- Jan. 2011
- Dec. 2010
- Nov. 2010
- Oct. 2010
- Sep. 2010
- Aug. 2010
- Jul. 2010
- Jun. 2010
- May. 2010
- Apr. 2010
- Mar. 2010
- Feb. 2010
- Jan. 2010
- Dec. 2009
- Nov. 2009
- Oct. 2009
- Sep. 2009
- Aug. 2009
- Jul. 2009
- Jun. 2009
- May. 2009
- Apr. 2009
- Mar. 2009
- Feb. 2009
- Jan. 2009
- Dec. 2008
- Nov. 2008
- Oct. 2008
- Sep. 2008
- Aug. 2008
- Jul. 2008
- Jun. 2008
- May. 2008
- Apr. 2008
- Mar. 2008
- Feb. 2008
02
February 2018


1. Introduction
KR has been developing regulations for the practical use of unmanned ships through its participation in the national research project, ‘Infrastructure technology for highly reliable operation of USVs at sea’ (2015~2020).
As a result of this research, the application of current procedures for type approval of unmanned ship systems were examined. It was decided that the following points should be considered in addition to the existing ones, for the safe operation of unmanned ships:
- Validation tests for the operation of the integrated system (limit of type approval)
- Software verification at the preliminary stage (prevention of unproductive loss from the
manufacturer's point of view)
- A method for overall performance evaluation after the type approval procedure.
2. Validation tests for the operation of the integrated system (limit of type approval)
Type approval is carried out when a manufacturer wants to obtain approval for the ship material and the equipment manufactured as a finished product. In this regard, the approval of each item of equipment does not guarantee the safety of the ship. Therefore, even after receiving the type approval, shop tests, on-board tests and sea trials of the integrated system must be carried out, to verify the safe operation of the unmanned ship.
3. Software verification at the preliminary stage (prevention of unproductive loss from the manufacturer's point of view)
As the complexity of integrated systems as applied to unmanned ships increases, the frequency of software errors also increases (multiple errors are included in the integration process of individual systems). Because the verification of these errors through sea trial tests is limited, a thorough verification system is needed to check the failure and malfunction of the integrated system.
If a system integrator confirms the implementation of a software and performs the integration test (trial tests for finding errors) at the FAT (Factory Acceptance Test) stage without first verifying the software, unproductive loss (cost/time) due to errors may occur (Lee et al, 2015).
Therefore, it is necessary to complete verification at the preceding stage, not later part of the unmanned ship construction process, in order to minimize software errors in the process.
If a system integrator intends to verify the software of an integrated control system on an unmanned ship, the software code should be verified in a confidential environment. Because of the constraints of the test environment, the HIL (Hardware in-the-Loop) test is a safe and effective method of software verification, being similar to a black box test.
- Wide test coverage in terms of stability and quality improvement: minimized risk, possibility
of harsh environment test
- Minimized schedule of system development: shortening the verification phase required for
the trial tests, verification of requirements in the early stages of development
However, unlike the software verification of existing automation systems in the shipbuilding and marine engineering industries, unmanned ships require sensors and environmental models for the verification of situational awareness and decision-making technologies, as well as dynamic models for the verification of control technology.

Examples of test scenario configuration (autonomous vehicles)
(Auto Journal, 2015)
The next step for the functional verification of the autonomous navigation system is carried out in the system design stage at the beginning of the development, using ideal sensor models without sensor errors. The sensors can be modeled by adding probabilistic errors to the ideal sensor models as needed.
After the general functions of the implemented algorithm are verified, physical sensor models (physics-based models that simulate reality, applying various malicious conditions (e.g. low/high light level and high color depth, etc) reflecting the characteristics of the actual sensor models and the integrated system are verified.
※ At present, it is not easy to develop and validate autonomous navigation technology in rough seas. However, unmanned ships are generally designed to carry out a predefined safety procedure when the operational limits for the environment are exceeded. Through the construction of sensor and environmental models, it is possible to pre-verify the function that can recognize rough sea situations and switch to the safe mode.
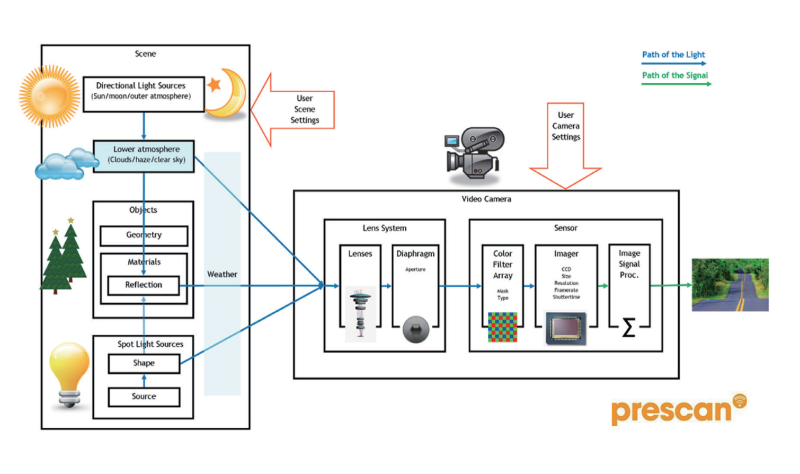
Example of physics based camera sensor model (Auto Journal, 2015)
[RGB based camera sensor model vs Physics based camera sensor model (Cho, 2015)]
|
RGB based camera sensor model |
Physics based camera sensor model |
|
● Simple functional verification ● Simulation only in RGB-based visible light
range
unsupported intensity of light |
● Verification in various malicious conditions
(e.g. low/high light level)
infrared light outside the visible range image |
4. A method for overall performance evaluation after the type approval procedure
In the case of autonomous vehicles, evaluation roads providing a variety of different road environments are built to test the safety levels of authorized agencies. Comprehensive safety evaluations (repeatable and measurable safety assessment) can then be carried out on finished autonomous vehicles using these road environments.
[Test beds for actual road evaluation of autonomous vehicles (MOLIT, 2016)]
|
Test beds |
US(M-City) |
Japan |
China (Nice City) |
Korea (K-City) |
|
Year of construction |
2015 |
2016 |
2016 |
2018 |
|
Operating agency |
University of Michigan |
Japan Automobile Research Institute (JARI) |
Shanghai International Train Co., Ltd. |
Korea Automobile Testing & Research Institute (KATRI) |
|
Construction cost |
About 13.5 billion won |
About 37.2 billion won |
- |
About 10 billion won |
|
Area |
130,000㎡ |
150,000㎡ |
5,000,000㎡ |
360,000㎡ |
|
Characteristic |
● Establishes a separate experimental cityon the university site areas such as roads,pedestrian crossings, intersections, crosswalks, underground roads and other suburban areas, such as cobbled streets, railway crossings, and four-lane roads,
etc. membership
management Circle (currently 18 members) Membership (currently 44 members)
|
● Consists of building models, roads, radio disturbance
equipment, etc. separate experimental city within the jurisdiction of the Japan Automobile Research Institute (JARI)
|
● 15km test road at JiaDing Automobile Park in Tongji
Campus environments for smart connected
vehicles expanded to 100㎢ demonstration area for smart and connected automobiles in 2019 |
● Operates 14 test roads (completed,
2,150,000㎡) (recreation of city areas and national roads)
etc. for autonomous driving is possible ● Establishes 5 traffic environments (downtown, community, department, etc.)
|
|
Aerial view |
|
|
|
|




However, unlike a road where formalized systems can be built, unmanned ships operate at sea where the fluctuation according to the weather is large and the environment is difficult to control. In addition, the system can be very widely applied from small ship to large ship and the verification of remote communication may be required. For these reasons, it is not easy to construct a standardized test bed, such as test road for autonomous vehicle driving evaluation.
Therefore, the most realistic alternative is to conduct sea trial tests in dangerous situations that would affect the operation of the unmanned ship and to examine the required reliability after examining errors. The errors may occur during the system integration process and might be missed during the trial operation, through sufficient software verification at the preceding stage as recommended in Section 2.
※ In Norway, pilot tests for unmanned ships with the autonomous navigation systems are being conducted in an official testing area, designated for trial tests of unmanned ships by the developers in Trondheim (2016) and Horten (2017).

(a) (b) (c)
Official designations as test areas (a: Trondheim / b: Horten) and an example of the sea trial test (c)
References
- KR, Rules and guidance for the classification of steel ships (Part 6, Part 9)
- KR, Guidance for approval of manufacturing process and type approval, etc.
- Lloyd’s Register (2016), ShipRight Procedure - Autonomous Ships, Cyber Enabled Ships
- Lloyd’s Register (2017), Design code for unmanned marine systems
- Ø.J. Rødseth et al. (2015), Risk Assessment for an Unmanned Merchant Ship, TRANSNAV
- Wilko C. Bruhn et al. (2014), Conducting look-out on an unmanned vessel, Introduction to the
advanced sensor module for MUNIN’s autonomous dry bulk carrier, ISIS 2014
- MOLIT (2016), Development of safety evaluation technology and construction of actual road
evaluation environments for autonomous vehicles
- Lee et al. (2015), HILS technology for improving productivity and quality of ship & offshore
plant, SNAK 52(4)
- Cho. (2015), Development and Validation of Autonomous Driving Vehicle Technology based on
MiL
