 KR 웹진 159호
KR 웹진 159호
- 2021년 12월
- 2021년 11월
- 2021년 10월
- 2021년 09월
- 2021년 08월
- 2021년 07월
- 2021년 06월
- 2021년 05월
- 2021년 04월
- 2021년 03월
- 2021년 02월
- 2021년 01월
- 2020년 12월
- 2020년 11월
- 2020년 10월
- 2020년 09월
- 2020년 08월
- 2020년 07월
- 2020년 06월
- 2020년 05월
- 2020년 04월
- 2020년 03월
- 2020년 02월
- 2020년 01월
- 2019년 12월
- 2019년 11월
- 2019년 10월
- 2019년 09월
- 2019년 08월
- 2019년 07월
- 2019년 06월
- 2019년 05월
- 2019년 04월
- 2019년 03월
- 2019년 02월
- 2019년 01월
- 2018년 12월
- 2018년 11월
- 2018년 10월
- 2018년 09월
- 2018년 08월
- 2018년 07월
- 2018년 06월
- 2018년 05월
- 2018년 04월
- 2018년 03월
- 2018년 02월
- 2018년 01월
- 2017년 12월
- 2017년 11월
- 2017년 10월
- 2017년 09월
- 2017년 08월
- 2017년 07월
- 2017년 06월
- 2017년 05월
- 2017년 04월
- 2017년 03월
- 2017년 02월
- 2017년 01월
- 2016년 12월
- 2016년 11월
- 2016년 10월
- 2016년 09월
- 2016년 08월
- 2016년 07월
- 2016년 06월
- 2016년 05월
- 2016년 04월
- 2016년 02월
- 2016년 01월
- 2015년 12월
- 2015년 11월
- 2015년 10월
- 2015년 09월
- 2015년 08월
- 2015년 07월
- 2015년 06월
- 2015년 05월
- 2015년 04월
- 2015년 03월
- 2015년 02월
- 2015년 01월
- 2014년 12월
- 2014년 11월
- 2014년 10월
- 2014년 09월
- 2014년 08월
- 2014년 07월
- 2014년 06월
- 2014년 05월
- 2014년 04월
- 2014년 03월
- 2014년 02월
- 2014년 01월
- 2013년 12월
- 2013년 11월
- 2013년 10월
- 2013년 09월
- 2013년 08월
- 2013년 07월
- 2013년 06월
- 2013년 05월
- 2013년 04월
- 2013년 03월
- 2013년 01월
- 2012년 12월
- 2012년 11월
- 2012년 10월
- 2012년 09월
- 2012년 08월
- 2012년 07월
- 2012년 06월
- 2012년 05월
- 2012년 04월
- 2012년 03월
- 2012년 02월
- 2012년 01월
- 2011년 02월
- 2011년 12월
- 2011년 11월
- 2011년 10월
- 2011년 09월
- 2011년 08월
- 2011년 07월
- 2011년 06월
- 2011년 05월
- 2011년 04월
- 2011년 03월
- 2011년 01월
- 2010년 12월
- 2010년 11월
- 2010년 10월
- 2010년 09월
- 2010년 08월
- 2010년 07월
- 2010년 06월
- 2010년 05월
- 2010년 04월
- 2010년 03월
- 2010년 02월
- 2010년 01월
- 2009년 12월
- 2009년 11월
- 2009년 10월
- 2009년 09월
- 2009년 08월
- 2009년 07월
- 2009년 06월
- 2009년 05월
- 2009년 04월
- 2009년 03월
- 2009년 02월
- 2009년 01월
- 2008년 12월
- 2008년 11월
- 2008년 10월
- 2008년 09월
- 2008년 08월
- 2008년 07월
- 2008년 06월
- 2008년 05월
- 2008년 04월
- 2008년 03월
- 2008년 02월
- 2008년 01월
- 2007년 12월
- 2007년 11월
- 2007년 10월
- 2007년 09월
- 2007년 08월
- 2007년 07월
- 2007년 06월
- 2007년 05월
- 2007년 04월
- 2007년 03월
- 2007년 02월
- 2007년 01월
- 2006년 12월
- 2006년 11월
- 2006년 10월
- 2006년 09월
- 2006년 08월
- 2006년 07월
- 2006년 06월
- 2006년 05월
- 2006년 04월
- 2006년 03월
- 2006년 02월
- 2006년 01월
- 2005년 12월
- 2005년 11월
- 2005년 10월
- 2005년 09월
- 2005년 08월
- 2005년 07월
- 2005년 06월
- 2005년 05월
- 2005년 04월
- 2005년 03월
- 2005년 02월
- 2005년 01월
- 2004년 12월
- 2004년 11월
02
2018년 02월


1. 개 요
KR은 ‘고신뢰성 무인선 운용 기술 및 인프라 구축’ 과제에 참여하면서(2015~2020) 무인선 실용화를 위한
제반 규정을 개발하고 있다. 본 연구를 진행하면서 무인선 시스템에 대한 현 형식승인 절차 적용에 대하여
검토하였으며, 검토 결과 무인선 안전 운용을 위해 다음의 사항이 추가적으로 고려되어야 할 것으로 판단되었다.
- 통합 시스템 상 작동의 유효성 검증(형식승인의 한계)
- 선행 단계에서의 소프트웨어 검증(제조자 관점에서의 비생산적 손실 방지)
- 형식승인 이후 종합 성능 평가 방안
2. 통합 시스템 상 작동의 유효성 검증(형식승인의 한계)
형식승인은 제조자가 완성품으로 제조한 선박용 재료 및 기기 등의 승인을 받고자 하는 경우 시행하는
것으로서 해당 기기의 승인 자체가 선박의 안전성을 보장하지는 않는다. 따라서 형식승인을 받은 이후에도 무인선의 안전한 운용을 위해서는 통합 시스템에 대한 완성시험과 선내시험, 해상시험이 추가적으로 시행
되어야 한다.
3. 선행 단계에서의 소프트웨어 검증(제조자 관점에서의 비생산적 손실 방지)
무인선에 적용되는 통합 시스템의 복잡도가 증가할수록 소프트웨어의 오류 발생 빈도는 증가한다(개별
시스템의 통합화 과정에서 다수의 오류 내포). 이러한 오류를 해상시운전으로 모두 검증하는 것은 한계가
있으므로 통합시스템의 고장 및 오작동을 테스트하기 위한 검증체계가 필요하다.
또한 소프트웨어에 대한 사전 검증 없이 FAT(Factory Acceptance Test) 단계에서 System integrator가
소프트웨어의 구현을 확인하고 통합테스트(오류를 찾는 시운전)를 실시할 경우 오류 발생에 따른 비생산적 손실(비용/시간)이 발생한다(이광국 등, 2015).
따라서 무인선박 건조 공정 후반부가 아닌 선행 단계에서부터 검증을 실시하여 소프트웨어 오류를 최소화
하고 공정을 최소화할 필요가 있다.
무인선 통합 제어시스템의 소프트웨어 검증을 System integrator가 수행하고자 하는 경우 소프트웨어 코드는 공개되지 않은 환경에서 검증을 수행하여야 하고 전술한 테스트 환경의 제약 조건을 고려할 때 블랙박스
테스트의 성격을 지닌 HIL(Hardware in-the-Loop) test가 소프트웨어 검증에 안전하고 효율적일 것으로 판단된다.
- 안정성 및 품질 향상 측면에서 넓은 테스트 범위 확보 : 위험 최소화, 가혹환경 테스트 가능
- 시스템 개발 일정 최소화 : 시운전 시 소요되는 검증 단계 단축, 개발 초기 요구사항에 대한 검증 및 확인
가능
다만, 무인선의 경우 기존 조선해양 분야 자동화 시스템 소프트웨어 검증의 경우와 달리 제어기술 검증을
위한 동역학 모델뿐 아니라 인지기술과 판단기술 검증을 위한 센서 및 환경 모델이 추가로 요구된다.
무인선의 인지기술 및 판단기술 검증을 위해 먼저 환경 모델 구성이 가능한 모델 기반 소프트웨어를 통해
해상에서 발생 가능한 수많은 위험 시나리오를 고려하여 트래픽 환경을 구성한다.

테스트 시나리오 구성 사례(자율주행자동차)
(Auto Journal, 2015)
다음으로 개발 초기 시스템 사양 설계 단계에서 센서 에러가 없는 이상적인 센서 모델을 이용하여 자율운항시스템의 기능 검증을 수행한다. 필요에 따라 이상적인 센서 모델에 임의의 확률적 오차를 추가하여 센서를 모델링 할 수 있다.
개발 초기 구현된 알고리즘의 일반적인 기능이 검증된 이후에는 실제 센서 모델의 특성을 반영하는 물리적 센서 모델(다양한 악의 조건(예 : 저,고조도), 높은 색심도 등 실제 영상에 준하는 물리기반 모델 적용)을 구현하고 통합시스템에 대한 검증을 실시한다.
※ 현재로서는 황천 시의 자율운항 기술을 개발하는 것과 검증하는 것 모두 쉽지 않다. 다만, 일반적으로
무인선의 경우 운용 환경 한계를 넘어설 경우 미리 정의된 안전 절차가 시행되도록 설계된다. 센서 및 환경 모델 구축을 통해 이러한 기능 즉, 선박이 현재 황천 상황 하에 놓여 있다는 것을 시스템이 스스로 인지하는 기능과 안전모드 상태로 전환하는 기능에 대하여는 사전 검증이 가능할 것으로 판단된다.
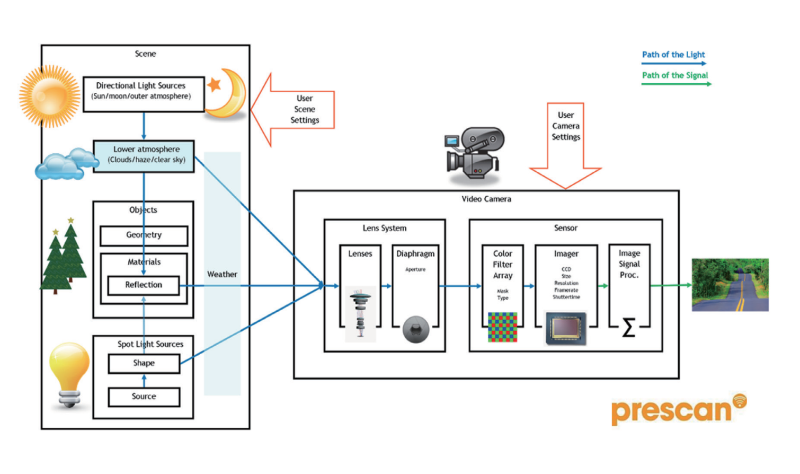
물리기반 카메라 센서 모델의 예 (Auto Journal, 2015)
RGB 기반 카메라 센서 모델 vs 물리기반 카메라 센서 모델 (조홍, 2015)
|
기존 RGB기반 카메라 센서 모델 |
물리기반 카메라 센서 모델 |
|
간단한 기능 검증 RGB 기반의 가시광선 범위에서만 시뮬레이션 HDR(High Dynamics Range) 시뮬레이션 미 지원 일반적인 기계 비전 알고리즘은 빛의 강도 (Intensity) 만을 이용 |
다양한 악의 조건(예 : 저, 고조도)에서 검증
가시광선 범위 외에 적외선과 같은 다양한 파장에서 시뮬레이션 HDR 시뮬레이션 지원 높은 색심도 실제 카메라 영상을 대신하는 HIL 확장 |
4. 형식승인 이후 종합 성능 평가 방안
자율주행자동차의 경우 공신력 있는 기관을 통한 안전성 확인을 담보하기 위해 다양한 실 도로 환경을
구현한 평가용 시험도로를 구축하고 있으며, 이를 통해 완성차 기반의 종합 안전성 평가(반복 재현 가능하고 표준화된 안전성 평가)를 실시하고자 하고 있다.
자율주행자동차 실 도로 평가용 테스트베드 구축 (국토교통부, 2016)
|
구분 |
미국(M-City) |
일본 |
중국(Nice City) |
대한민국(K-City) |
|
구축년도 |
2015년 |
2016년 |
2016년 |
2018년 |
|
운영기관 |
미시간대학교 |
일본자동차연구소 (JARI) |
상해국제기차성 유한공사 |
자동차안전연구원(KATRI) |
|
구축비용 |
약 135억원 |
약 372억원 |
- |
약 100억원 |
|
면적 |
13만㎡(약 3.9만평) |
15만㎡(약 4.5만평) |
500만㎡ (약151만평) |
36만㎡(약 11만평) |
|
특징 |
학교 부지에 별도 실험 도시 구축 도로, 가건물, 교차 로, 횡단보도, 지하 차도 등으로 구성 된 도시부와 자갈길, 철도건널목, 4차선 도로 등 교외부를 재현 멤버쉽 차등 운영 - Leadership Circle (현 18개 회원사) - Affiliate Membership (현 44개 회원사) |
빌딩모형, 도로, 무 선통신 교란장비 등 으로 구성 일본자동차연구소 (JARI) 관할 구역 내 별도의 실험도시 구축 |
자딩 자동차 파크 퉁지대 자딩캠퍼스 일대 시험도로 15km 조성 스마트 커넥티드 차량에 29종의 테스 트 환경을 제공 2019년 100㎢규모 의 스마트·커넥티드 자동차 종합 도시 시범구로 확대할 예정 |
14개 시험로 운영 (기구축, 65만평) - ITS 시험로 (시가지 및 국도등 재현) 등 - 자율차 연속주행 시험 가능 5개 교통환경 구축 (도심부, 커뮤니티부 등) |
|
조성도 |
|
|
|
|




다만, 무인선의 경우 정형화된 시스템이 구축되어 있는 도로와 달리 기상에 따른 변동 폭이 크고 인위적인
환경 조절이 어려운 해상에서 운용된다는 점, 시스템 적용 선박 규모가 소형선부터 대형선에 이르기까지
매우 폭넓다는 점, 그리고 원거리 통신 제어 검증이 요구될 수 있다는 점 등의 이유로 자율주행자동차 평가용 시험도로와 같이 표준화된 틀에 맞춰진 테스트베드를 구축하기가 쉽지 않다.
따라서 현재로서는 2절에 권고된 바와 같이 선행 단계에서 충분한 소프트웨어 검증을 통해 시스템 통합 과정에서 발생할 수 있는 오류와 시운전 시 놓칠 수 있는 오류를 심도 있게 검토한 뒤 해당 무인선박에 대하여
지정된 운용 환경 및 발생 가능한 위험 상황에 대한 실선 시험을 무인선 테스트 전용 해역에서 시행하여 요구되는 신뢰성을 검토하는 방안이 가장 현실적인 대안인 것으로 판단된다.
※ 노르웨이에서는 무인선 개발자(NTNU, Kongsberg, MARINTEK, Maritime Robotics 등)주도로 2016년 Trondheim, 2017년 Horten에 무인선 테스트 및 시운전을 위한 공식적인 테스트 해역을 마련하고 자율운항 기능을 갖춘 무인선 실증 시험을 시행하고 있다.

(a) (b) (c)
테스트 해역 공식 지정(a : Trondheim / b : Horten) 및 시운전 예(c)
참고문헌
- KR, 선급 및 강선규칙(전기설비 및 제어시스템, 추가설비(자동화설비))
- KR, 제조법 및 형식승인 등에 관한 지침
- Lloyd’s Register (2016), ShipRight Procedure - Autonomous Ships, Cyber Enabled Ships
- Lloyd’s Register (2017), Design code for unmanned marine systems
- Ø.J. Rødseth et al. (2015), Risk Assessment for an Unmanned Merchant Ship, TRANSNAV
- Wilko C. Bruhn et al. (2014), Conducting look-out on an unmanned vessel, Introduction to the advanced
sensor module for MUNIN’s autonomous dry bulk carrier, ISIS 2014
- 국토교통부 (2016), 자율주행자동차 안전성 평가기술개발 및 실도로 평가환경 구축 상세기획 보고서
- 이광국 (2015), 선박/해양플랜트 생산성 및 품질 향상을 위한 HILS 기술, 대한조선학회지 52(4)
- 조홍 (2015), 자율주행 기술 개발 지원을 위한 MiLS 기반 검증 기술, Auto Journal 2015-10
