KR Webzine Vol.112
KR Webzine Vol.112
- Dec. 2021
- Nov. 2021
- Oct. 2021
- Sep. 2021
- Aug. 2021
- Jul. 2021
- Jun. 2021
- May. 2021
- Apr. 2021
- Mar. 2021
- Feb. 2021
- Jan. 2021
- Dec. 2020
- Nov. 2020
- Oct. 2020
- Sep. 2020
- Aug. 2020
- Jul. 2020
- Jun. 2020
- May. 2020
- Apr. 2020
- Mar. 2020
- Feb. 2020
- Jan. 2020
- Dec. 2019
- Nov. 2019
- Oct. 2019
- Sep. 2019
- Aug. 2019
- Jul. 2019
- Jun. 2019
- May. 2019
- Apr. 2019
- Mar. 2019
- Feb. 2019
- Jan. 2019
- Dec. 2018
- Nov. 2018
- Oct. 2018
- Sep. 2018
- Aug. 2018
- Jul. 2018
- Jun. 2018
- May. 2018
- Apr. 2018
- Mar. 2018
- Feb. 2018
- Jan. 2018
- Dec. 2017
- Nov. 2017
- Oct. 2017
- Sep. 2017
- Aug. 2017
- Jul. 2017
- Jun. 2017
- May. 2017
- Apr. 2017
- Mar. 2017
- Feb. 2017
- Jan. 2017
- Dec. 2016
- Nov. 2016
- Oct. 2016
- Sep. 2016
- Aug. 2016
- Jul. 2016
- Jun. 2016
- May. 2016
- Apr. 2016
- Mar. 2016
- Feb. 2016
- Jan. 2016
- Dec. 2015
- Nov. 2015
- Oct. 2015
- Sep. 2015
- Aug. 2015
- Jul. 2015
- Jun. 2015
- May. 2015
- Apr. 2015
- Mar. 2015
- Feb. 2015
- Jan. 2015
- Dec. 2014
- Nov. 2014
- Oct. 2014
- Sep. 2014
- Aug. 2014
- Jul. 2014
- Jun. 2014
- May. 2014
- Apr. 2014
- Mar. 2014
- Feb. 2014
- Jan. 2014
- Dec. 2013
- Nov. 2013
- Oct. 2013
- Sep. 2013
- Aug. 2013
- Jul. 2013
- Jun. 2013
- May. 2013
- Apr. 2013
- Mar. 2013
- Jan. 2013
- Dec. 2012
- Nov. 2012
- Oct. 2012
- Sep. 2012
- Aug. 2012
- Jul. 2012
- Jun. 2012
- May. 2012
- Apr. 2012
- Mar. 2012
- Feb. 2012
- Jan. 2012
- Dec. 2011
- Nov. 2011
- Oct. 2011
- Sep. 2011
- Aug. 2011
- Jul. 2011
- Jun. 2011
- May. 2011
- Apr. 2011
- Mar. 2011
- Feb. 2011
- Jan. 2011
- Dec. 2010
- Nov. 2010
- Oct. 2010
- Sep. 2010
- Aug. 2010
- Jul. 2010
- Jun. 2010
- May. 2010
- Apr. 2010
- Mar. 2010
- Feb. 2010
- Jan. 2010
- Dec. 2009
- Nov. 2009
- Oct. 2009
- Sep. 2009
- Aug. 2009
- Jul. 2009
- Jun. 2009
- May. 2009
- Apr. 2009
- Mar. 2009
- Feb. 2009
- Jan. 2009
- Dec. 2008
- Nov. 2008
- Oct. 2008
- Sep. 2008
- Aug. 2008
- Jul. 2008
- Jun. 2008
- May. 2008
- Apr. 2008
- Mar. 2008
- Feb. 2008
06
June 2017


1. Introduction
The technical requirements for unmanned ships are increasing in order to reduce the cost of ship operations, to provide better conditions for seafarers and to improve safety and efficiency.
Already, small unmanned ships are under development or are carrying out specific
missions in designated waters in the US, Israel and other countries. However, the commercialization of commercial unmanned ships with autonomous navigation
capabilities based on big data is unlikely in the short term.
The biggest reason that commercialization is difficult to achieve in the short term is organizational rather than technical. In other words, there is not yet a legal/contractual system suitable for these type of ships, and it is difficult to integrate autonomous ships into the current maritime transport system in the short term.
This study proposes guidelines for the operation of unmanned vessels in Korea, based
on the guidelines proposed by SARUMS, one of the unmanned ship development
projects in Europe, and introduces the main concepts applied to the proposed guidelines.
2. Guidelines for unmanned ship operations (Draft)
The hull of an unmanned ship is not largely different from existing vessel frames, but collision avoidance and unmanned system operation are important in the development and operation of unmanned ships.
In this study, the systems, specific to the unmanned ships were identified, and the basic specifications required for each operating system were analyzed. Based on the results of this analysis and the SARUMS guideline requirements, the Guidelines for Unmanned Ship Operation were proposed.
The main contents are as follows:
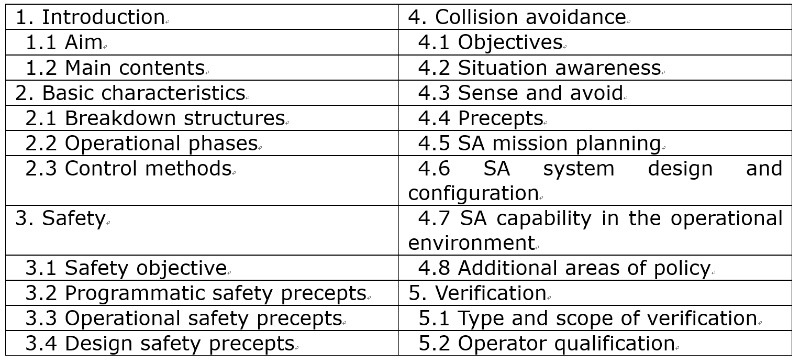
Guideline contents
3. Major systems and control levels
Through these guidelines, the system configuration, operational phase, control levels and concept of operation systems have been established. Based on this, management guidelines for each possible risk situation in operation and detailed rules for collision avoidance control have been proposed.
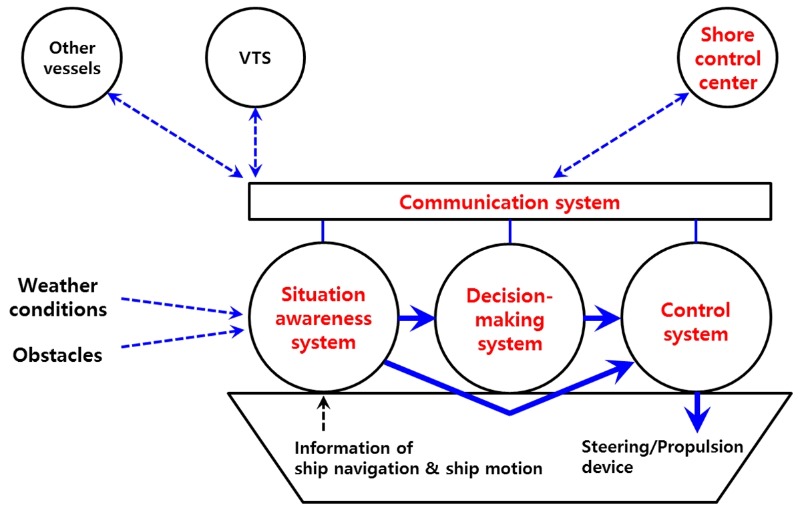
3.1 Definition of main systems
|
System |
Definition |
Function |
|
Situation awareness system |
A system that recognizes the external situation related to the route and the internal situation related to the navigation and motion |
- Identification and tracking of marine environment/obstacles → Transfer identification/tracking information to decision-making system - Measurement of ship navigation and motion information → Transfer measurement information to decision-making and control systems |
|
Decision-making system |
A system for establishing a route plan based on external situation and ship navigation/motion information |
- Merge/analysis of external information identified from the situation awareness system, judgment of encounter situation (identify whether to avoid or ignore, ask operator to confirm) - Route planning based on external situation analysis results and ship navigation/motion information → Transfer the established route plan to the control system |
|
Control system |
A system that controls the propulsion and steering of an unmanned ship in accordance with the route plan |
- Establishing the steering plan based on the navigation/motion information measured by the situation awareness system and the route plan established by the decision-making system. → Control of the steering and propulsion system according to the established steering plan |
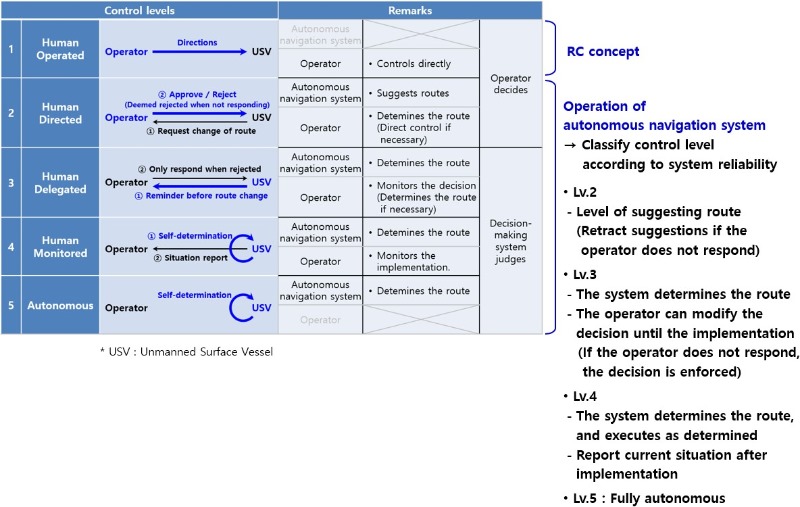
3.2 Control levels